Введение
Робототехника давным давно вышла за пределы научно-фантастических романов и в настоящее время является одной из движущих сил, определяющих прогресс во многих областях, таких как автоматизация производства, медицина, космос и т.д. Важную роль в робототехнике играют программные симуляторы, т.к. они не только упрощают работу инженеров, но и позволяют исследователям испытывать новейшие алгоритмы искусственного интеллекта (AI) и машинного обучения. Одним из таких симуляторов является Simbad - проект с открытым кодом, разработанный на основе технологии Java 3D. В данной статье мы расскажем, как программировать виртуальных роботов, используя инструментарий Simbad, для получения лучшего представления об одной из философий проектирования роботов - архитектуре поглощения (subsumption architecture).
Начало статьи посвящено краткому обзору робототехники и концепции архитектуры поглощения. Затем мы перейдем к инструментарию Simbad и расскажем, как, используя его, можно реализовать данную архитектуру. После этого придет время создания простого робота в соответствии с описанной архитектурой. В конце концов, вы окунетесь в занимательный мир лабиринтов и создадите второго робота, который, подобно Гомеру из Симпсонов, сможет самостоятельно из них выбираться. Разумеется, созданные роботы будут "виртуальными", т.е. будут жить в виртуальной среде Simbad.
Программирование роботов
На данный момент не существует единого, всеми признаваемого определения термина "робот". В нашей статье, под роботом мы будем подразумевать нечто, состоящее как минимум из следуюших компонентов:
- Набора сенсоров
- Программы, определяющей поведение робота
- Набора приводов и эффекторов
Традиционная робототехника
Под традиционной робототехникой обычно понимается период развития данной области вплоть до 1986 года. Для того времени было характерно представление о роботе, как о механизме, управляемом центральным контроллером (мозгом), который постоянно обновляет свое представление об окружающем мире и вырабатывает план поведения, исходя из этого представления. Новая информация о мире поступает от сенсоров, например, осязания, света, ультразвука и т.д. Мозг анализирует всю информацию от сенсоров и обновляет представление об окружающей среде, а затем принимает решение о том или ином действии. Все действия выполняются с помощью приводов и эффекторов. Первые обычно представляют собой некие двигатели, подсоединенные к устройствам, непосредственно взаимодействующим с окружающим миром - эффекторам. Примерами последних могут служить колеса или руки. При этом иногда под приводами (actuators) понимаются как сами приводы, так и эффекторы.
Таким образом, традиционный робот получает данные от множества сенсоров, комбинирует эти данные в процессе обновления картины мира, затем вырабатывает план действий на основе данной картины, и наконец, приводит его в исполнение. К сожалению, данный подход сопряжен с определенными трудностями. Во-первых, он требует большого объема вычислений. Во-вторых, поддержка актуальной картины окружающего мира - задача очень сложная, т.к. мир меняется постоянно. При этом известно, что многие организмы, например, насекомые, благополучно существуют и без поддержки полной картины мира, более того, даже не имея памяти как таковой. Так может стоит попробовать перенять их подход к функционированию? Подобные размышления стали отправной точкой нового течения в робототехнике, доминирующего в настоящее время. Оно получило название "поведенческая робототехника" (behavior-based robotics - BBR).
Архитектура поглощения
Одним из способов организации BBR-роботов является архитектура поглощения, предложенная в 1986 г. Родни Бруксом (Rodney A. Brooks) - в настоящее время главой лаборатории искусственного интеллекта в Массачусетском Технологическом Институте (MIT) - в его фундаментальной статье под названием "Слоны не играют в шахматы". Согласно Бруксу, поведенческие роботы можно рассматривать как набор простых и независимых поведенческих узлов (behaviors), каждый из которых определяется двумя вещами - тем, что вызывает данное поведение (как правило, информация, поступающая от сенсоров), и тем действием, что является его результатом (как правило, выполненным с помощью эффектора). Поведения могут наслаиваться друг на друга, а также конфликтовать между собой. В этом случае, в действие вступает специальный механизм арбитража , который решает, какое поведение в данный момент является приоритетным. Ключевым моментом является то, что поведение робота, как единого целого, не закладывается заранее, а вырисовывается из взаимодействия его поведенческих узлов. Более того, по мнению сторонников BBR, глобальное поведение является чем-то большим, чем просто суперпозицией его частей. Оно поглощает каждое из локальных, низкоуровневых поведений. В целом, идея заключается в том, что вместо проектирования робота и точного описания его поведения во всех ситуациях, можно просто добавлять поведенческие узлы и смотреть, что получится в результате.
Simbad: среда для моделирования роботов
|
Simbad предназначен для программного моделирования роботов. Согласно Web-странице проекта, Simbad "предоставляет программные средства для разработки роботов, описания их воздействия на окружающий мир, а так же использования сенсоров. Simbad был в первую очередь разработан для исследователей, которым необходим простой инструментарий для изучения ситуационного искусственного интеллекта, машинного обучения и алгоритмов AI вообще, особенно применительно к автономным роботам и агентам".
Simbad был разработан на Java Луи Уге (Louis Hugue) и Николя Бредешем (Nicolas Bredeche). Проект размещен на сервере SourceForge.net и может свободно использоваться или модифицироваться в соответствии с лицензией GNU GPL (General Public License).
Технические подробности
Мир в среде Simbad может содержать как агентов (роботов), так и различные неодушевленные предметы, такие как, ящики, стены, источники света и т.д. Время в этом мире дискретно, т.е. разбито на интервалы. Simbad включает в себя планировщик, распределяющий время между агентами. Аналогично реальным роботам, агенты Simbad имеют как сенсоры (датчики расстояния, осязания, света и т.д.), так и приводы (как правило, колеса). В любой отведенный ему момент времени, робот может выполнять какое-то действие.
Классы, реализующие агентов, должны переопределять метод performBehavior(), который описывает их поведение. Внутри этого метода робот может анализировать поступающую от сенсоров информацию и изменять вращательную и поступательную составляющие скорости движения. На исполнение метода performBehavior() отводится короткий промежуток времени, поэтому нельзя отдавать такие команды, как, например, "продвинуться вперед на один метр". Для того чтобы обойти это ограничение как правило приходится постоянно контролировать состояние, в котором находится робот. Кроме этого можно использовать таймер для отслеживания количества временных интервалов, в течение которых робот находился в текущем состоянии.
Simbad API
В примерах к данной статье в основном затрагиваются вопросы, связанные со следующими двумя пакетами, входящими в состав Simbad API:
simbad.sim: Классы данного пакета описывают как самих роботов, так и окружающий их мир. Основными классами являются:Agent: Сами роботы.Arch: Арки, которые роботы могут объезжать либо проезжать под ними.Box: Описывают препятствия на пути робота.CameraSensor: Позволяет получать доступ к картине окружающего мира с точки зрения робота.EnvironmentDescription: Описывает среду, в которую можно добавлять как роботов, так и неодушевленные объекты, например, стены и другие препятствия.LampActuator: Фары, которые можно добавлять к своему роботу.LightSensor: Сенсоры света.RangeSensorBelt: Набор датчиков расстояния, которые могут быть расположены по периметру робота.RobotFactory: Используется для добавления различных сенсоров к роботу.Wall: Еще один тип препятствия для движения робота.
simbad.gui: Классы из данного пакета отображают самого робота и позволяют его контролировать. Основным классом являются следующий:Simbad: Окно, отображающее картину мира робота, информацию, поступающую с его сенсоров, а так же управляющие элементы.
Реализация архитектуры поглощения с помощью Simbad
|
Реализовывать архитектуру поглощения на основе Simbad мы начнем с объявления класса-потомка Agent под названием BehaviorBasedAgent. Каждый экземпляр данного класса будет содержать массив поведений (объектов типа Behavior), а так же булеву матрицу, хранящую информацию об их попарном поглощении.
private Behavior[] behaviors; private boolean suppresses[][]; |
Класс BehaviorBasedAgent выступает в роли планировщика поведений. В листинге 1 приведен фрагмент кода, итерирующего по массиву поведений и регулирующего их запуск. При этом переменная currentBehaviorIndex используется для хранения ссылки на поведение, которое должно быть активировано на следующем шаге алгоритма.
Листинг 1. Цикл для поочередной активации поведений и разрешения конфликтов
protected void performBehavior() {
boolean isActive[] = new boolean[behaviors.length];
for (int i = 0; i < isActive.length; i++) {
isActive[i] = behaviors[i].isActive();
}
boolean ranABehavior = false;
while (!ranABehavior) {
boolean runCurrentBehavior = isActive[currentBehaviorIndex];
if (runCurrentBehavior) {
for (int i = 0; i < suppresses.length; i++) {
if (isActive[i] && suppresses[i][currentBehaviorIndex]) {
runCurrentBehavior = false;
break;
}
}
}
if (runCurrentBehavior) {
if (currentBehaviorIndex < behaviors.length) {
Velocities newVelocities = behaviors[currentBehaviorIndex].act();
this.setTranslationalVelocity(newVelocities
.getTranslationalVelocity());
this
.setRotationalVelocity(newVelocities
.getRotationalVelocity());
}
ranABehavior = true;
}
if (behaviors.length > 0) {
currentBehaviorIndex = (currentBehaviorIndex + 1)
% behaviors.length;
}
}
}
|
Отметьте, что метод performBehavior() перегружает аналогичный метод в классе simbad.sim.Agent.
В классе поведения Behavior объявлено два абстрактных (abstract) метода:
isActive(): Метод возвращает булево значение, показывающее, должно ли данное поведение быть активировано в данный момент времени, учитывая информацию, поступающую от сенсоров. При этом все экземпляры классаBehaviorимеют доступ к общему набору сенсоров.act(): Метод возвращает новые значения поступательной и вращательной скорости (именно в таком порядке), являющиеся результатом активации поведения.
Пример блуждающего робота, притягивающегося к источникам света
Теперь пришло время создать программного робота (или бота), который будет включать 4 нижеперечисленных поведения, хранящихся в порядке убывания приоритета. Код бота показан в листингах со второго по пятый.
Avoidance: Изменяет направление движения после столкновения или в попытке предотвратить столкновение.LightSeeking: Направляет движение в сторону источника света.Wandering: Периодически меняет направление движения произвольным образом.StraightLine: Направляет движение по прямой.
public boolean isActive() {
return getSensors().getBumpers().oneHasHit()
// getSensors().getSonars().oneHasHit();
}
public Velocities act() {
double translationalVelocity = 0.8;
double rotationalVelocity = 0;
RangeSensorBelt sonars = getSensors().getSonars();
double rotationalVelocityFactor = Math.PI / 32;
if (getSensors().getBumpers().oneHasHit()) {
// Произошло столкновение
translationalVelocity = -0.1;
rotationalVelocity = Math.PI / 8
- (rotationalVelocityFactor * Math.random());
} else if (sonars.oneHasHit()) {
// Считывание показаний эхолокаторов
double left = sonars.getFrontLeftQuadrantMeasurement();
double right = sonars.getFrontRightQuadrantMeasurement();
double front = sonars.getFrontQuadrantMeasurement();
// Препятствие близко
if ((front < 0.7) // (left < 0.7) // (right < 0.7)) {
double maxRotationalVelocity = Math.PI / 4;
if (left < right)
rotationalVelocity = -maxRotationalVelocity
- (rotationalVelocityFactor * Math.random());
else
rotationalVelocity = maxRotationalVelocity
- (rotationalVelocityFactor * Math.random());
translationalVelocity = 0;
} else {
rotationalVelocity = 0;
translationalVelocity = 0.6;
}
}
return new Velocities(translationalVelocity, rotationalVelocity);
}
|
public boolean isActive() {
float llum = getSensors().getLightSensorLeft().getAverageLuminance();
float rlum = getSensors().getLightSensorRight().getAverageLuminance();
double luminance = (llum + rlum) / 2.0;
// Активизироваться если источник света неподалеку
return luminance > LUMINANCE_SEEKING_MIN;
}
public Velocities act() {
// Повернуть в сторону источника света
float llum = getSensors().getLightSensorLeft().getAverageLuminance();
float rlum = getSensors().getLightSensorRight().getAverageLuminance();
double translationalVelocity = 0.5 / (llum + rlum);
double rotationalVelocity = (llum - rlum) * Math.PI / 4;
return new Velocities(translationalVelocity, rotationalVelocity);
}
|
public boolean isActive() {
return random.nextDouble() < WANDERING_PROBABILITY;
}
public Velocities act() {
return new Velocities(0.8, random.nextDouble() * 2 * Math.PI);
}
|
Листинг 5. Класс StraightLine class
public boolean isActive() {
return true;
}
public Velocities act() {
return new Velocities(0.8, 0.0);
}
|
В листинге 6 показано поглощение одних поведений другими.
Листинг 6. Объявление булевой матрицы, описывающей попарное поглощение поведений
private void initBehaviorBasedAgent(BehaviorBasedAgent behaviorBasedAgent) {
Sensors sensors = behaviorBasedAgent.getSensors();
Behavior[] behaviors = { new Avoidance(sensors),
new LightSeeking(sensors), new Wandering(sensors),
new StraightLine(sensors), };
boolean subsumes[][] = { { false, true, true, true },
{ false, false, true, true }, { false, false, false, true },
{ false, false, false, false } };
behaviorBasedAgent.initBehaviors(behaviors, subsumes);
}
|
В данном примере набор поведений полностью упорядочен в соответствии с приоритетом. В общем случае, это необязательно.
В качестве упражнения вы можете попробовать реализовать следующие вещи:
- Социальное поведение: движение навстречу друзьям и в сторону от врагов.
- Избегание источников света.
- Добавить фары к некоторым роботам, так, чтобы они начали притягиваться друг к другу.
Лабиринты
"Ну, наконец-то! Я так и знала, что из этого лабиринта можно выбраться, действуя по алгоритму Тремо!" - Лиза Симпсон
Из всей массы алгоритмов выхода из лабиринтов, два выделяются тем, что используют объем памяти, не зависящий от размера самого лабиринта. Они известны под названиями "следование вдоль стены" (wall-following) и алгоритм Пледжа . Последний был назван в честь Джона Пледжа (Jon Pledge) из Эксетера, который изобрел алгоритм в возрасте 12 лет. Кроме этого есть еще великолепный алгоритм Тремо (Tremaux algorithm) - любимый алгоритм Лизы Симпсон - но в целях упрощения мы рассмотрим только первые два.
|
Следование вдоль стены
Этот алгоритм настолько прост, что многие обучаются ему еще в детстве. Все что требуется для выхода - это вести левой рукой по левой стене (или правой рукой по правой стене) пока не встретите выход. Несложно видеть, что данный алгоритм работает безупречно для лабиринтов, в которых вход и выход расположены на периметре. К сожалению, алгоритм нельзя применять в случае, если выход расположен на острове - части лабиринта, не соединенной с остальными стенами. В этой ситуации алгоритм не найдет выход, потому что нельзя перепрыгнуть пустое пространство до острова, не отрывая руку от стены.
Алгоритм Пледжа
Алгоритм Пледжа более сложен, но зато способен находить выход из большего числа лабиринтов за счет возможности переходов от одного острова к другому. Идея алгоритма заключается в том, что надо выбрать некое абсолютное направление (север, юг, запад или восток) и всегда стараться ему следовать. Назовем его предпочтительным направлением . В случае если вы упираетесь в стену, вы поворачиваете направо и движетесь в соответствии с алгоритмом "следование вдоль стены" до тех пор, пока не выполнится два условия. Первое - это поворот в предпочтительном направлении, а второе - сумма всех ранее сделанных поворотов равна нуля (при этом каждый поворот против часовой стрелки принимается за единицу, а по часовой стрелке, соответственно, за минус единицу). После этого вы продолжаете двигаться в предпочтительном направлении пока это возможно и так далее. Условие на нулевую сумму поворотов необходимо для избегания разного рода ловушек, например, участков лабиринтов, имеющих форму G (нарисуйте ее на бумаге и сразу поймете, о чем я).
Алгернон: робот, выбирающийся из лабиринтов
Пришло время удивить ваших друзей, создав робота по имени Алгернон (Algernon), задачей которого будет выход из лабиринтов.
Проектирование робота
Для реализации как алгоритма Пледжа, так и следования вдоль стены необходимо точно определять момент, когда робот подходит к разветвлению в лабиринте, а также иметь возможность указать, какое направление выбрать.
Наверняка это можно реализовать множеством способов, но мы будем использовать специальный сенсор - эхолокатор, расположенный на левой стороне робота. Этот сенсор будет посылать сигналы при пересечении ответвлений слева по ходу движения. Для того чтобы определять, что впереди тупик, мы добавим еще один сенсор - датчик касания, расположенный в лобовой части робота.
Реализация алгоритма следования вдоль стены
Весь код Алгернона будет размещен в пакете algernon.subsumption. Алгернон - это достаточно простой робот и его вполне можно запрограммировать в процедурном стиле. В то же время, даже для такого простого робота, подход, основанный на поглощении поведений, делает код намного чище, легче для понимания, а также способствует лучшей организации модулей.
Мы сделаем еще одно допущение в целях упрощения примера: будем считать, что все стены пересекаются под прямыми углами. Другими словами, все повороты налево и направо осуществляются исключительно на 90 градусов.
Леворукий алгоритм следования вдоль стены можно декомпозировать на четыре различных поведения:
- Идти прямо.
- Упершись в стену, повернуть направо.
- Встретив ответвление влево, повернуть.
- Остановиться при нахождении выхода.
Поведениям необходимо присвоить приоритеты. В данном примере, мы их выберем в том же порядке, в каком они перечислены выше. В итоге нам понадобятся четыре класса-наследника Behavior:
GoStraightTurnRightTurnLeftReachGoal
В листинге 7 показан код класса GoStraight, в котором TRANSLATIONAL_VELOCITY - это константа, равная 0.4:
Листинг 7. Реализация поведения для движения по прямой
public boolean isActive() {
return true;
}
public Velocities act() {
double rotationalVelocity = 0.0;
return new Velocities(TRANSLATIONAL_VELOCITY, rotationalVelocity);
}
|
Код класса TurnRight показан в листинге 8. Метод getRotationCount() возвращает количество временных интервалов, необходимых для поворота на 90 градусов при данной скорости вращения.
Листинг 8. Реализация поведения для поворота направоBehavior code for turning right
public boolean isActive() {
if (turningRightCount > 0) {
return true;
}
RangeSensorBelt bumpers = getSensors().getBumpers();
// Проверка переднего бампера.
if (bumpers.hasHit(0)) {
backingUpCount = 10;
turningRightCount = getRotationCount();
return true;
} else {
return false;
}
}
public Velocities act() {
if (backingUpCount > 0) {
// Робот уперся в стену. Надо чуть отойти назад перед поворотом
backingUpCount--;
return new Velocities(-TRANSLATIONAL_VELOCITY, 0.0);
} else {
turningRightCount--;
return new Velocities(0.0, -Math.PI / 2);
}
}
|
Для поворота налево, Алгернон должен сначала чуть продвинуться вперед так, что стена слева от него закончится. Затем он поворачивается налево и проходит еще немного вперед так что, по его левую сторону опять находится стена. Код показан в листинге 9.
Листинг 9. Реализация поведения для поворота налево
public boolean isActive() {
if (postGoingForwardCount > 0) {
return true;
}
RangeSensorBelt sonars = getSensors().getSonars();
// Проверка эхолокатора слева
if (sonars.getMeasurement(1) > 1.0) {
// Слева коридор
preGoingForwardCount = 20;
postGoingForwardCount = 40;
turnLeftCount = getRotationCount();
return true;
} else {
return false;
}
}
public Velocities act() {
if (preGoingForwardCount > 0) {
preGoingForwardCount--;
return new Velocities(TRANSLATIONAL_VELOCITY, 0.0);
} else if (turnLeftCount > 0) {
turnLeftCount--;
return new Velocities(0.0, Math.PI / 2);
} else {
postGoingForwardCount--;
return new Velocities(TRANSLATIONAL_VELOCITY, 0.0);
}
}
|
Код класса ReachGoal показан в листинге 10.
Листинг 10. Поведение при обнаружении выхода из лабиринта
public boolean isActive() {
RangeSensorBelt sonars = getSensors().getSonars();
// Впереди открытое пространство? Другими словами, нашли ли мы выход из лабиринта?
double clearDistance = 1.2;
return sonars.getMeasurement(0) > clearDistance
&& sonars.getMeasurement(1) > clearDistance
&& sonars.getMeasurement(3) > clearDistance
&& sonars.getMeasurement(2) > clearDistance;
}
public Velocities act() {
// Остановка
return new Velocities(0.0, 0.0);
}
|
Главный метод, определяющий поведение Алгернона приведен в листинге 11.
Листинг 11. Код управления поведениями Алгернона
private void initBehaviorBasedAgent(
algernon.subsumption.BehaviorBasedAgent behaviorBasedAgent) {
algernon.subsumption.Sensors sensors = behaviorBasedAgent.getSensors();
algernon.subsumption.Behavior[] behaviors = { new ReachGoal(sensors),
new TurnLeft(sensors), new TurnRight(sensors),
new GoStraightAlways(sensors) };
boolean subsumes[][] = { { false, true, true, true },
{ false, false, true, true }, { false, false, false, true },
{ false, false, false, false } };
behaviorBasedAgent.initBehaviors(behaviors, subsumes);
}
|
На рисунке 1 показано, как Алгернон движется по лабиринту.
Рисунок 1. Алгернон, двигающийся по лабиринту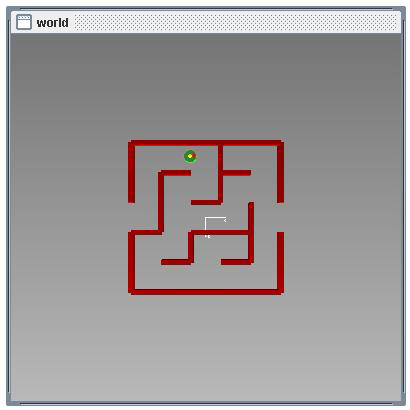
Заметим, что робот успешно решает задачу выхода, несмотря на то, что ни один из его компонентов ничего не знает не только о лабиринтах, но даже о стенах. Не существует никакого центрального узла, выступающего в роли мозга, просчитывающего путь выхода. В этом и заключается суть архитектуры поглощения: сложное поведение, будто бы специально спроектированное для решения конкретной задачи, вырисовывается при взаимодействии простых, наслоенных друг на друга поведений.
Заключение
В данной статье рассматривалось создание простого программного робота. Программирование реального, физически существующего робота представляет собой значительно более сложную задачу, в основном из-за того, что приходится учитывать все аспекты влияния окружающего мира. Например, в рассмотренном примере было достаточно просто заставить робота двигаться прямо вдоль стены. В реальном мире с его неровными поверхностями, весьма непросто реализовать движение робота таким образом, чтобы он не ударялся об стену и одновременно не удалялся от нее слишком далеко. Так что, даже если вы любите программировать, не факт, что программирование роботов доставит вам удовольствие, т.к. зачастую это требует больше механической, чем творческой работы.
Обратите внимание на инструментарий LEGO Mindstorms, если вы заинтересовались проектированием и программированием роботов. В качестве альтернативы, можно поработать с роботами BEAM (Biological Electronic Aesthetics Mechanics). BEAM далее развивает идею поведенческой робототехники, вообще убирая программирование как таковое. Глобальное поведение робота определяется жестко заданными соединениями поведенческих узлов, работающих на рефлексах. Заплатив не более $30 вы сможете построить своего первого BEAM-робота. Также можно спроектировать робота по чертежам, которые вы найдете в книге Гарета Бранвина (Gareth Branwyn) "Создание роботов для абсолютных новичков". Ну и, наконец, всегда можно купить Румбу и взломать его.
Один из поразительных выводов, к которому я пришел, начав заниматься программированием роботов, а также после поверхностного знакомства с кодом других разработчиков, - это то, что необязательно писать длинные программы, чтобы создать робота, обладающего весьма обширной функциональностью. При этом, правда, зачастую приходится долго шлифовать программу и экспериментировать с константами, чтобы робот делал именно то, что нужно. Используя же инструментарий LEGO Mindstorms, вы вполне сможете создать простого робота за вечер.
Робототехника - это своего рода захватывающая субкультура, включающая в себя книги, соревнования, видео и т.д. Вполне возможно, что даже недалеко от вас есть клуб или кружок любителей роботов.